

प्वाइंट क्लाउड ऑटोमेटा (पीसीए) पोस्ट-प्रोसेसिंग सॉफ्टवेयर

व्यक्ति से संपर्क करें : Lanbooxie
फ़ोन नंबर : +86 15527360208
WhatsApp : +8615527360208


| न्यूनतम आदेश मात्रा : | 1 | मूल्य : | Negotiation |
|---|---|---|---|
| पैकेजिंग विवरण : | कोई नहीं | प्रसव के समय : | 1-3 कार्य दिवसों भुगतान के बाद से |
| भुगतान शर्तें : | टी / टी, वेस्टर्न यूनियन | आपूर्ति की क्षमता : | कोई सीमा नहीं |
| उत्पत्ति के प्लेस: | चीन | ब्रांड नाम: | Geosun |
|---|---|---|---|
| प्रमाणन: | Intellectual Property Right | मॉडल संख्या: | gAirhawk सॉफ्टवेयर |
|
विस्तार जानकारी |
|||
| नाम: | gAirhawk LiDAR डेटा प्रोसेस सॉफ्टवेयर | आवेदन 1: | प्वाइंट क्लाउड आउटपुट |
|---|---|---|---|
| आवेदन 2: | एलएएस फ़ाइल आउटपुट | समारोह 3: | 3डी डाटा प्रोसेसिंग |
| हाई लाइट: | LAS फाइल जेनरेट किया गया सॉफ्टवेयर,प्वाइंट क्लाउड LiDAR डाटा प्रोसेसिंग सॉफ्टवेयर,LiDAR 3D डेटा प्रोसेसिंग |
||
उत्पाद विवरण
gAirHawk सॉफ्टवेयर परिचय
प्वाइंट क्लाउड डेटा प्रोसेस और एलएएस फाइल जेनरेटेड सॉफ्टवेयर
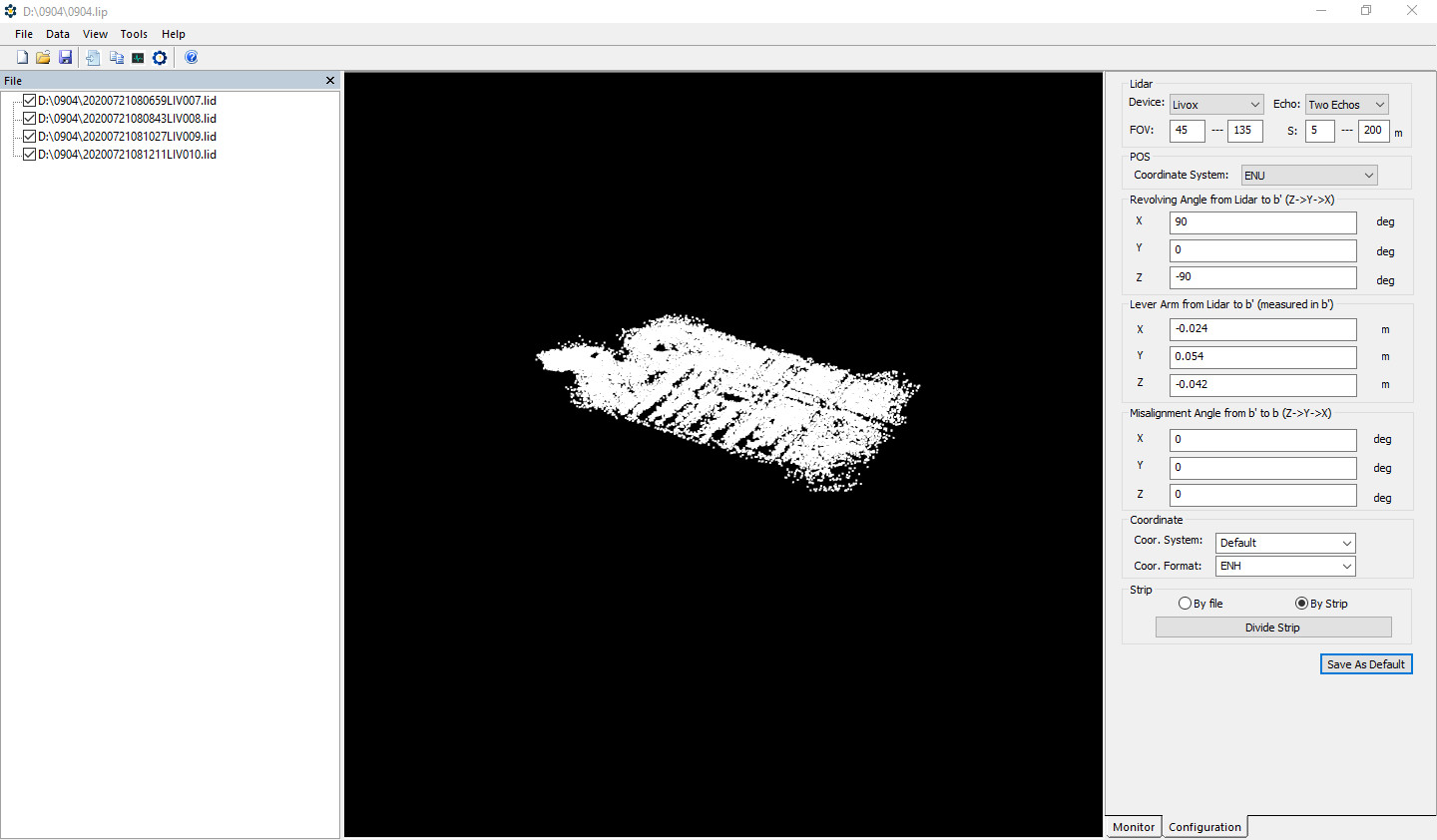
gAirHawk एक लिडार स्कैनिंग सिस्टम एक्विजिशन मॉनिटरिंग और पॉइंट क्लाउड कंप्यूटिंग सॉफ्टवेयर है जिसे जियोसन नेविगेशन द्वारा स्व-विकसित किया गया है।यह रीयल-टाइम कॉन्फ़िगरेशन और फील्ड डेटा एक्विजिशन सिस्टम की निगरानी, रीयल-टाइम और पोस्ट-प्रोसेस लेज़र स्कैनिंग डेटा की डिकोडिंग, पॉइंट क्लाउड डेटा की गणना और प्रदर्शन, जियोसन लिडार स्कैनिंग सिस्टम के लिए सपोर्टिंग सॉफ़्टवेयर का समर्थन करता है।
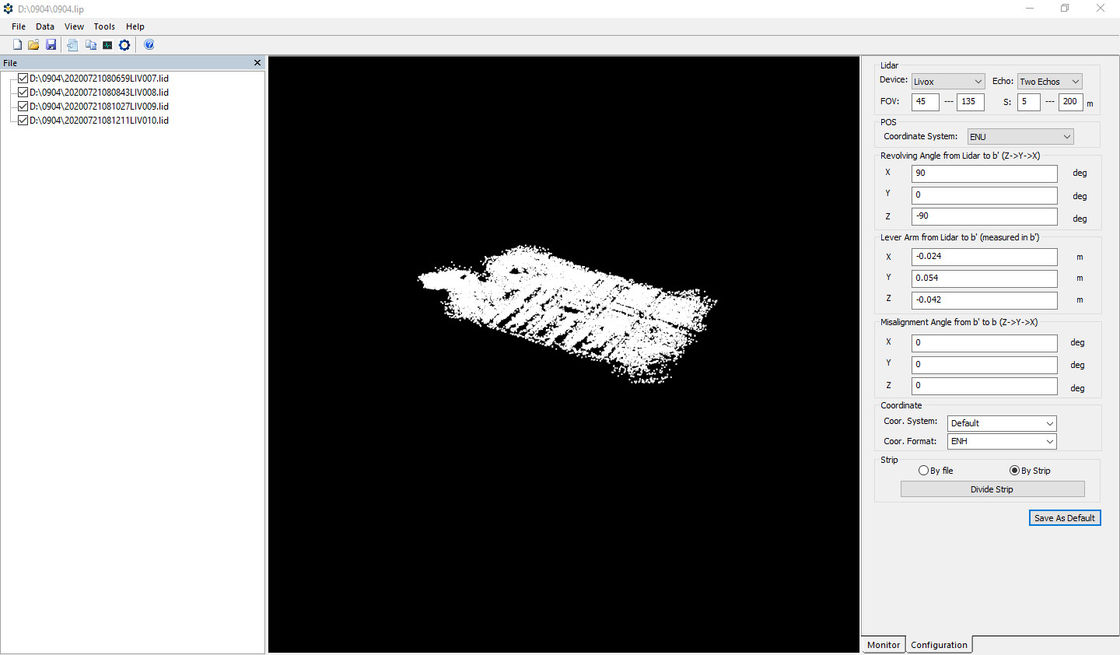
गारहाक का इंटरफ़ेस
जीएयरहॉक सॉफ्टवेयर के 4 8 संस्करण का संचालन - YouTube
![]()
नई परियोजना और संचालन बनाएं
![]()
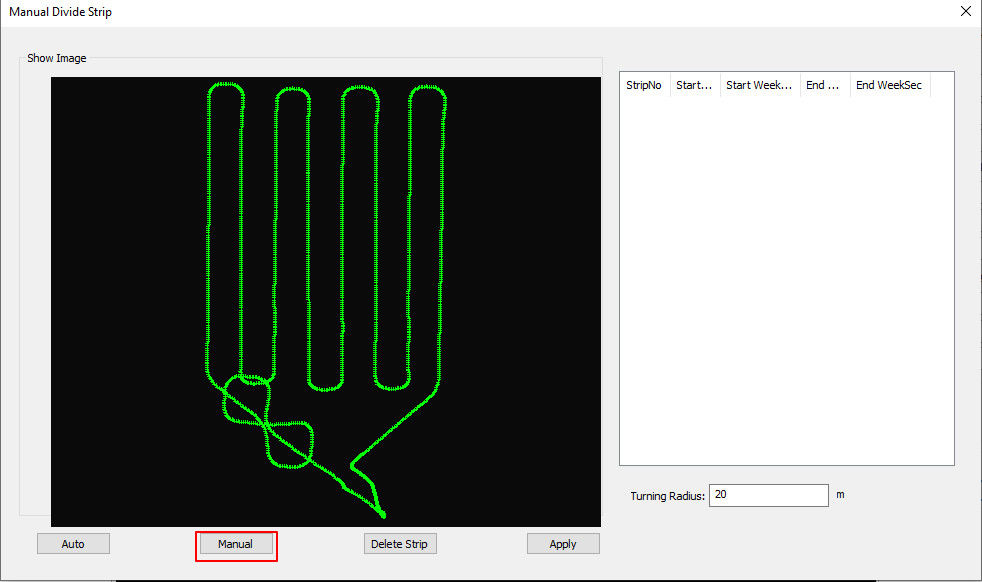
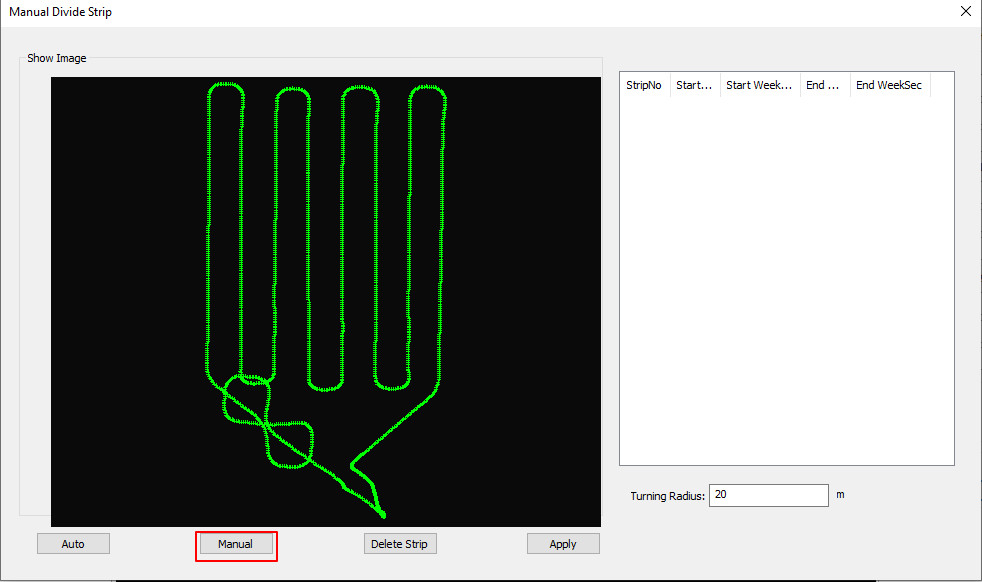
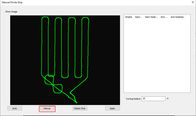
स्ट्रिप द्वारा विभाजित
![]()
![]()
![]()
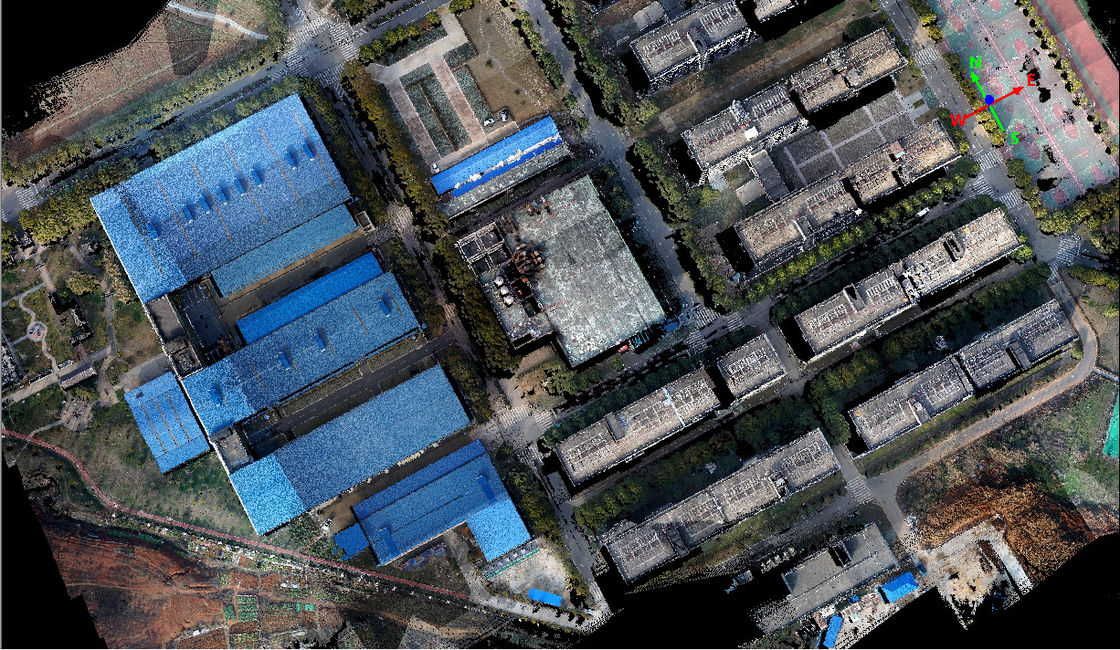
लिडार डेटा प्रोसेस और पॉइंट क्लाउड आउटपुट
![]()
![]()
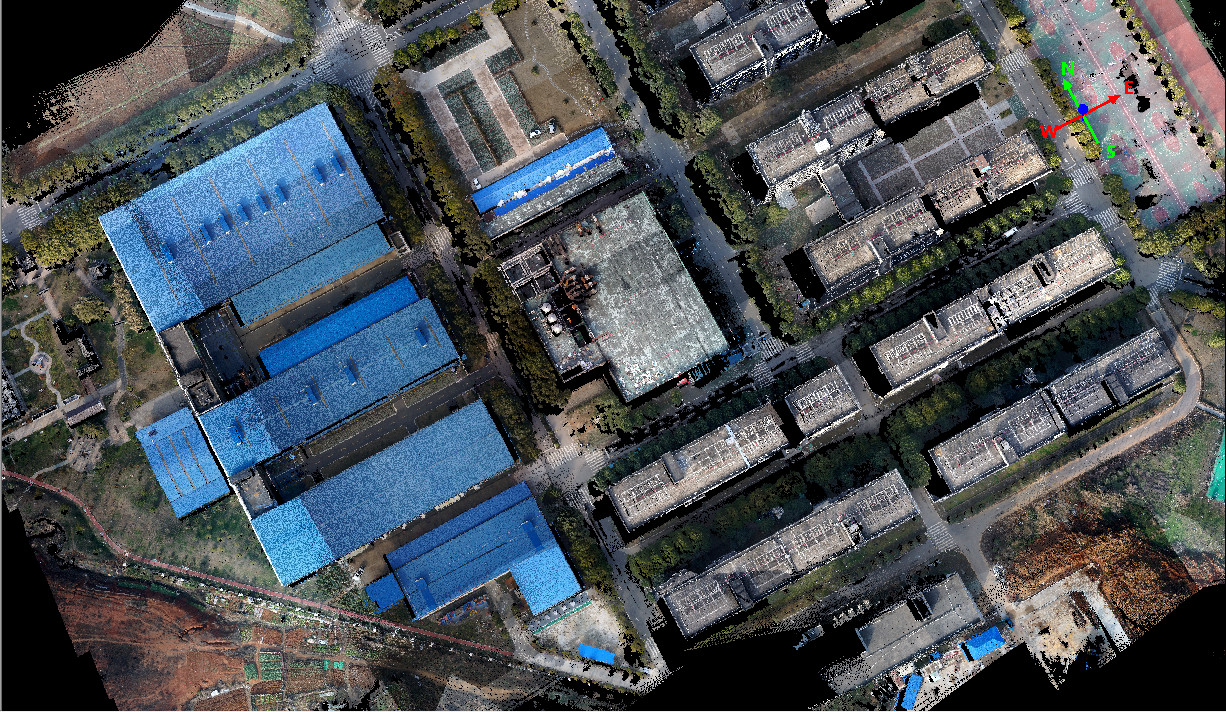
रंग बिंदु बादल
![]()
![]()
निम्नलिखित के रूप में gAirhawk सॉफ्टवेयर के 4.6 संस्करण के लिंक:
https://drive.google.com/drive/folders/14PqJiu5K7_wKgyA6y4AZBZbdVBYZNd6O?usp=sharing
अपना संदेश दर्ज करें
| Wuhan Geosun Navigation Technology Co., Ltd |
| 4एफ, बिल्डिंग डी, तियानी प्लाजा नंबर 8 वेस्ट मौदियांशान रोड, ईस्ट लेक हाई-टेक जोन वुहान सिटी, चीन |
| +86--15527360208 |
| sales@geosunlidar.com |